Simulation - A Vibrating String Model - EdsCave
Main menu
- Home Page
- Sensors
- Simulation
- Analytics
- Forecasting
- Football Forecasting
- Random Corner
- Projects
- Resources
- Blog
- About/Contact
- Creative Works
- Separator 1
- Privacy & Terms
Simulation - A Vibrating String Model
3 JAN 2016
This blog will discuss a physical simulation of system that all you musicians out there should be familiar with -

Familiar example of vibrating strings
The physical system is pretty simple to implement in the real world. You take a string or a wire, and you attach it to two endpoints, and apply some tension. This is the basis of 'stringed' instruments such as the guitar, piano and violin.

An ideal string in 'Flatland' -
Strings on real instruments can behave in many 'interesting' ways, depending on non-
1) The density (mass/length) is uniform.
2) The elasticity is perfectly linear.
3) There is no friction or other losses -
3) The only motion is in the 'Y' direction in an X,Y plane -
The mathematical relation that describes this system is well known, and is called a Hyperbolic Partial Differential Equation. If you say it out loud this sounds really cool, like something you use for programming the warp drives on the starship Enterprise. But it is also known as the 'wave equation', as it and related forms describe the propagation of all kinds of waves, both acoustic and electromagnetic.
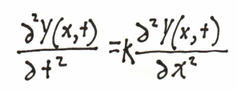
A Hyperbolic Partial Differential Equation looks as cool as it sounds
So what does this equation mean? Translated into English, it says that the second derivative of the 'Y' motion with respect to time (the left side) for each point along the string is equal to the second derivative of 'Y' with respect to 'X' (the right side) for that point. For this physical system, these two derivatives have intuitively understandbale equivalents -

For a numerical simulation, we model a String as a series of discrete points.
Although this type of hyperbolic PDE has an analytic solutions, we are interested in a numerical simulation. The first step in doing this is to approximate the continuous problme by a discrete one, where the string is modeled as a series of points along it. The spacing between points in the 'X' direction will be called Δx. The solution we will come up with will only descibe the positions of these discrete points. If for some reason we were to care about points in between theese points, these could be estimated by interpolation. In a discrete simulation, it is important to have anough points to be able to accurately describe the expected phenomenon. For example, if we were interested in modeling a standing wave with 4 periods (shown as an example below), we will need a lot more than 4 points to model this properly -

Curvature (2nd derivative in X) controls how each point is pulled up or down
When breaking the string up into a series of points, it becomes intuitively obvious how the curvature, or second derivative relates to the acceleration. If you consider three points along the string assume the outside ones are fixed, that the central one is free to move, and pretend they are connected by elastic segments, there are three possible behaviors. The first case is when the curvature is negative, the stretched segments will try to pull the middle point down (negative acceleration). The seocnd is when the middle point is lower than the outer ones, in which case the stretched segments will try to pull the middle point up (positive acceleration). The final case is when all points are in a line, and the middle point is pulled both up and down equally, and as a result experiences no overall acceleration.
Once we have modeled the string as a series of points spaced by Δx we then have to come up with a discrete approximation to the second derivative. When learning calculus, the first derivative is usually described as (y(x+Δx) -

A discretized approximation for the second derivative with respect to 'X'
Similarly, we can also approximate the second derivative with respect to time the same way, as shown below. This may seem a bit strange at first glance, as this expression involves knowing a future value of Y, specifically the subexpression Y(x,t+Δt).
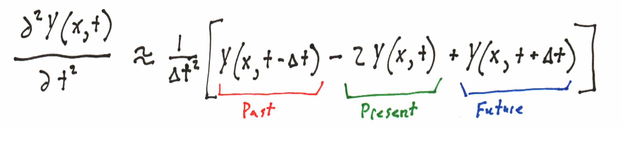
A discretized approximation for the second derivative with respect to time
Having a future value for Y somewhere in the expression is actually very important, at it allows us to form an explicit equation defniing that future value in terms of previous values. If you set the above two apporximations equal to each other (as they are in the PDE), and solve for Y(x,t+Δt), you get the following expression:

Combining the previous two equations provides an explicit 'update formula' to compute Y(x, t+Δt) -
The following figure shows one way of visualizing the relationships between points in time and space. The top point is the future value of Y at a given point, yet to be computed. The points in the row below represent known current values for that point and its immediate neighbors, while the point at the bottom is the prior value of Y. Knowledge of that previous point is essential to computing the second derivative in time.
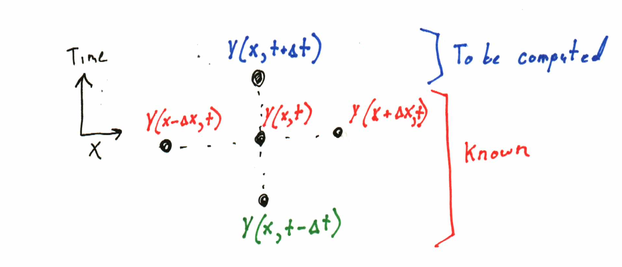
Graphic relation of points in expression -
After all of the above theory, it turns out that the 'computer' part of the computer simulation is pretty simple. Below is some example code for performing the update step -
// Y() -
// Y1() -
// Ynew() -
// NPts is the upperbound in the Y and Y1 state arrays
// dx = 1/NPts -
// dt is the timestep
// K is a scaling constant that accounts for the tension and mass of the
// string (tension/mass).
// Only update points 1..N-
// Calculate new position
Ynew(i) = 2*Y(i) -
* (Y(i-
next
// Update prior and current position
for i = 1 to Npts-
Y1(i) = Y(i)
Y(i) = Ynew(i)
next
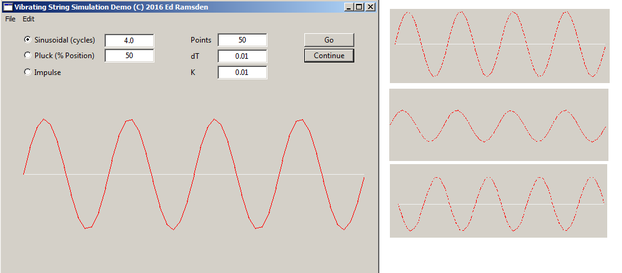
Of course, more than half the fun of a simulation is how it responds to different inputs -
So how does our vibrating string model behave? If we set an initial condition of 4 cycles of a sine wave, the lobes bounce alternately positive and negative in what is known as a standing wave pattern. This behavior is exactly what we would expect from a physics-
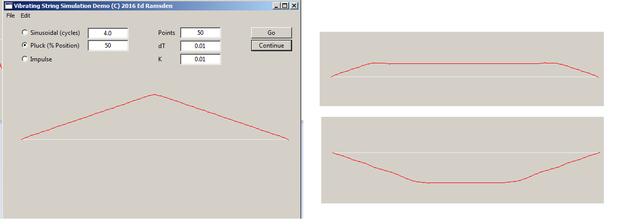
The real value of numerical simulation is that it allows us to look at cases that are more complex than the typical textbook ones. for example, consider the case in which the string is held at a single point in the center, and then released [1]. This has a very different behavior in that a region of flatness spreads out as the string moves toward the center position and reforms as a triangle on the negative side before reversing direction.
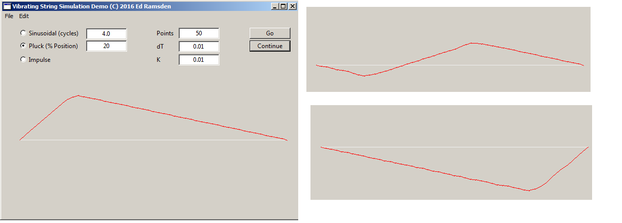
If you pluck the string at some point other than the center, the wave appears to move to the right and bounces off the end in reversed polarity. This wave reflection phenomenon is also something you would expect from a physics-
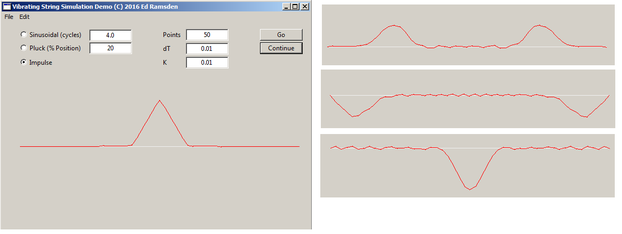
A much better illustration of the reflection phenomenon can be seen if the initial condition is a single pulse in the middle of the string -
If you looked at the above examples closely, one thing you may have noticed is that 'dT' is a very small value. This has two effects. First it makes the simulation run slower, as it traverses less time with each 'update' cycle. More importantly, it maintains stability. Like other simulations in which there are feedfback loops present, not only will the accuracy suffer with too large timesteps, but the solution will very quickly numerically explode into something meaningless, as in the following example with dT set to 0.3:
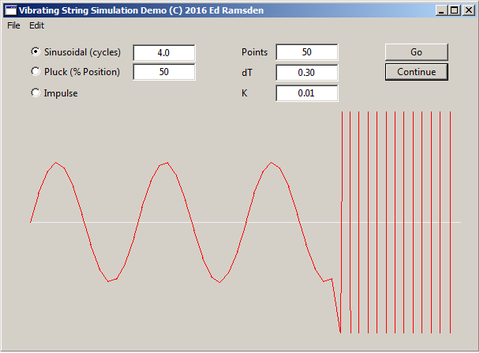
Too big a time step results not only in poor accuracy, but sometimes even numerical instability (shown)
Notes:
[1] -
References:
Partial Differential equations for Scientists and Engineers, Stanley J. Farlow, Dover Publications 1993, New York